รายงาน
เรื่อง PLC : Programmable Logic Controller
จัดทำโดย
นาย สมชาย ยางสูง 5457051082
นาย ธฤต พรหมเมือง 5457051060
นาย ชญาสิทธิ์ วิชาเครื่อง 5457051054
นาย ทรงสิทธิ์ ลีงาลาห์ 5457051057
เสนอโดย
อาจารย์ ธภัทร ชัยชูโชค
PLC คืออะไร? Programmable Logic Controller เครื่องควบคุมเชิงตรรกที่สามารถโปรแกรมได้
PLC : Programmable Logic Controller (มีต้นกำ เนิดจากประเทศสหรัฐอเมริกา) เป็นเครื่องควบคุมอัตโนมัติในโรงงานอุตสาหกรรมที่สามารถจะโปรแกรมได้ ถูกสร้างและพัฒนาขึ้นมาเพื่อทดแทนวงจรรีเลย์ อันเนื่องมาจากความต้องการที่อยากจะได้เครื่องควบ คุมที่มีราคาถูกสามารถใช้งานได้อย่างเอนกประสงค์ และสามารถเรียนรู้การใช้งานได้ง่าย
ข้อแตกต่างระหว่าง PLC กับ COMPUTER1. PLC ถูกออกแบบ และสร้างขึ้นเพื่อให้ทนต่อสภาพแวดล้อมในโรงงานอุตสาหกรรมโดยเฉพาะ
2. การโปรแกรมและการใช้งาน PLC ทำได้ง่ายไม่ยุ่งยากเหมือนคอมพิวเตอร์ทั่วไป PLC มีระบบการตรวจสอบตัวเองตั้งแต่ช่วงติดตั้ง
จนถึงช่วงการใช้งานทำให้การบำรุงรักษาทำได้ง่าย
3. PLCถูกพัฒนาให้มีความสามารถในการตัดสินใจสูงขึ้นเรื่อยๆทำให้การใช้งานสะดวกขณะที่วิธีใช้คอมพิวเตอร์ยุ่งยากและซับซ้อนขึ้น
ประวัติ PLC
ค.ศ.1969
PLCได้ถูกพัฒนาขึ้นมาครั้งแรกโดย บริษัท Bedford Associates โดยใช้ชื่อว่า Modular Digital Controller(Modicon) ให้กับโรงงานผลิตรถยนต์ในอเมริกาชื่อ General Motors Hydramatic Division บริษัท Allen-Bradley ได้เสนอระบบควบคุมโดยใช้ชื่อว่า PLC
ค.ศ.1970-1979
ได้มีการพัฒนาให ้PLC มีการประมวลผลที่เร็วมากขึ้นตามการเปลี่ยนแปลงของ Microprocessor ความสามารถในการสื่อสารข้อมูลระหว่าง PLC กับ PLC โดยระบบแรกคือ Modbus ของ Modicon เริ่มมีการใช้อินพุท/เอาท์พุทที่เป็นสัญญาณ Analog
ค.ศ.1980-1989
มีความพยายามที่จะสร้างมาตรฐานในการสื่อสารข้อมูลของ PLC โดยบริษัท General Motor ได้สร้างโปรโตคอลที่เรียกว่า manufacturing automation protocal (MAP) ขนาดของ PLC ลดลงเรื่อย ๆผลิตซอฟแวร์ที่สามารถโปรแกรม PLC ด้วยภาษา symbolic โดยสามารถโปรแกรมผ่านทาง personal computer แทนที่จะโปรแกรมผ่านทาง handheld หรือ programing terminal
ค.ศ.1990-ปัจัจจุบัน
ได้มีความพยายามในการที่จะทำให้ภาษาที่ใช้ในการโปรแกรม PLC มีมาตราฐานเดียวกันโดยใช้มาตรฐาน IEC1131-3 สามารถโปรแกรม PLC ได้ด้วย
- IL (Instruction List)
- LD (Ladder Diagrams)
- FBD (Function Block Diagrams)
- SFC (Sequential Function Chart)
- ST (Structured Text)
โครงสร้างโดยทั่วไปของ PLC
ลักษณะโครงสร้างภายในของ PLC ซึ่งประกอบด้วย
1.ตัวประมวลผล(CPU) ทำหน้าที่คำนวณเเละควบคุม ซึ้งเปรียบเสมือนสมองของ PLC ภายในประกอบด้วยวงจรลอจิกหลายชนิดและมีไมโครโปรเซสเซอร์เบส (Micro Processor Based)ใช้แทนอุปกรณ์จำพวกรีเลย์ เคาน์เตอร์/ไทม์เมอร์ และซีเควนเซอร์ เพื่อให้ผู้ใช้สามารถออกแบบวงจรโดยใช้ Relay Ladder Diagram ได้ CPU จะยอมรับข้อมูลจากอุปกรณ์อินพุทต่างๆ จากนั้นจะทำการประมวลผลและเก็บข้อมูลโดยใช้โปรแกรมจากหน่วยความจำ หลังจากนั้นจะส่งส่งข้อมูลที่เหมาะสมและถูกต้องออกไปยังอุปกรณ์เอาท์พุท
2.หน่วยความจำ(Memory Unit) ทำหน้าที่เก็บรักษาโปรแกรมและข้อมูลที่ใช้ในการทำงาน โดยขนาดของหน่วยความจำจะถูกแบ่งออกเป็นบิตข้อมูล(Data Bit) ภายในหน่วยความจำ 1 บิต ก็จะมีค่าสภาวะทางลอจิก 0 หรือ 1แตกต่างกันแล้วแต่คำสั่ง ซึ่ง PLC ประกอบด้วยหน่วยความจำสองชนิดคือ ROM และRAM
RAM ทำหน้าที่เก็บโปรแกรมของผู้ใช้และข้อมูลที่ใช้ในการปฏิบัติงานของ PLC หน่วยความจำประเภทนี้จะมีแบตเตอรี่เล็กๆ ต่อไว้เพื่อใช้เป็นไฟเลี้ยงข้อมูลเมื่อเกิดไฟดับ การอ่านและการเขียนข้อมูลลงใน RAM ทำได้ง่ายมาก เพราะฉะนั้นจึ่งเหมากับงานในระยะทดลองเครื่องที่มีการเปลี่ยนแปลงแก้ไขโปรแกรมอยู่บ่อยๆ
ROM ทำหน้าที่เก็บโปรแกรมสำหรับใช้ในการปฏิบัติงานของ PLC ตามโปรแกรมของผู้ใช้ หน่วยความจำแบบ ROM ยังสามารถแบ่งได้เป็น EPROM ซึ่งจะต้องใช้อุปกรณ์พิเศษในการเขียนและลบโปรแกรม เหมาะกับงานที่ไม่ต้องการเปลี่ยนแปลงโปรแกรม นอกจากนี้ยังมีแบบ EEPROM หน่วยความจำประเภทนี้ไม่ต้องใช้เครื่องมือพิเศษในการเขียนและลบโปรแกรม สามารถใช้งานได้เหมือนกับ RAM แต่ไม่ต้องใช้แบตเตอรี่สำรอง แต่ราคาจะแพงกว่าเนื่องจากรวมคุณสมบัติของ ROM และ RAM ไว้ด้วยกัน
RAM ทำหน้าที่เก็บโปรแกรมของผู้ใช้และข้อมูลที่ใช้ในการปฏิบัติงานของ PLC หน่วยความจำประเภทนี้จะมีแบตเตอรี่เล็กๆ ต่อไว้เพื่อใช้เป็นไฟเลี้ยงข้อมูลเมื่อเกิดไฟดับ การอ่านและการเขียนข้อมูลลงใน RAM ทำได้ง่ายมาก เพราะฉะนั้นจึ่งเหมากับงานในระยะทดลองเครื่องที่มีการเปลี่ยนแปลงแก้ไขโปรแกรมอยู่บ่อยๆ
ROM ทำหน้าที่เก็บโปรแกรมสำหรับใช้ในการปฏิบัติงานของ PLC ตามโปรแกรมของผู้ใช้ หน่วยความจำแบบ ROM ยังสามารถแบ่งได้เป็น EPROM ซึ่งจะต้องใช้อุปกรณ์พิเศษในการเขียนและลบโปรแกรม เหมาะกับงานที่ไม่ต้องการเปลี่ยนแปลงโปรแกรม นอกจากนี้ยังมีแบบ EEPROM หน่วยความจำประเภทนี้ไม่ต้องใช้เครื่องมือพิเศษในการเขียนและลบโปรแกรม สามารถใช้งานได้เหมือนกับ RAM แต่ไม่ต้องใช้แบตเตอรี่สำรอง แต่ราคาจะแพงกว่าเนื่องจากรวมคุณสมบัติของ ROM และ RAM ไว้ด้วยกัน
3.หน่วยอินพุต-เอาต์พุต (Input-Output Unit) หน่วยอินพุต ทำหน้าที่รับสัญญาณจากอุปกรณ์ภายนอกแล้วแปลงสัญญาณให้เป็นสัญญาณที่เหมาะสมแล้วส่งให้หน่วยประมวลผลต่อไป
โครงสร้างโดยทั่วไปของ PLC
ลักษณะโครงสร้างภายในของ PLC ซึ่งประกอบด้วย 
1.ตัวประมวลผล(CPU) ทำหน้าที่คำนวณเเละควบคุม ซึ้งเปรียบเสมือนสมองของ PLC ภายในประกอบด้วยวงจรลอจิกหลายชนิดและมีไมโครโปรเซสเซอร์เบส (Micro Processor Based)ใช้แทนอุปกรณ์จำพวกรีเลย์ เคาน์เตอร์/ไทม์เมอร์ และซีเควนเซอร์ เพื่อให้ผู้ใช้สามารถออกแบบวงจรโดยใช้ Relay Ladder Diagram ได้ CPU จะยอมรับข้อมูลจากอุปกรณ์อินพุทต่างๆ จากนั้นจะทำการประมวลผลและเก็บข้อมูลโดยใช้โปรแกรมจากหน่วยความจำ หลังจากนั้นจะส่งส่งข้อมูลที่เหมาะสมและถูกต้องออกไปยังอุปกรณ์เอาท์พุท
2.หน่วยความจำ(Memory Unit) ทำหน้าที่เก็บรักษาโปรแกรมและข้อมูลที่ใช้ในการทำงาน โดยขนาดของหน่วยความจำจะถูกแบ่งออกเป็นบิตข้อมูล(Data Bit) ภายในหน่วยความจำ 1 บิต ก็จะมีค่าสภาวะทางลอจิก 0 หรือ 1แตกต่างกันแล้วแต่คำสั่ง ซึ่ง PLC ประกอบด้วยหน่วยความจำสองชนิดคือ ROM และRAM
RAM ทำหน้าที่เก็บโปรแกรมของผู้ใช้และข้อมูลที่ใช้ในการปฏิบัติงานของ PLC หน่วยความจำประเภทนี้จะมีแบตเตอรี่เล็กๆ ต่อไว้เพื่อใช้เป็นไฟเลี้ยงข้อมูลเมื่อเกิดไฟดับ การอ่านและการเขียนข้อมูลลงใน RAM ทำได้ง่ายมาก เพราะฉะนั้นจึ่งเหมากับงานในระยะทดลองเครื่องที่มีการเปลี่ยนแปลงแก้ไขโปรแกรมอยู่บ่อยๆ
ROM ทำหน้าที่เก็บโปรแกรมสำหรับใช้ในการปฏิบัติงานของ PLC ตามโปรแกรมของผู้ใช้ หน่วยความจำแบบ ROM ยังสามารถแบ่งได้เป็น EPROM ซึ่งจะต้องใช้อุปกรณ์พิเศษในการเขียนและลบโปรแกรม เหมาะกับงานที่ไม่ต้องการเปลี่ยนแปลงโปรแกรม นอกจากนี้ยังมีแบบ EEPROM หน่วยความจำประเภทนี้ไม่ต้องใช้เครื่องมือพิเศษในการเขียนและลบโปรแกรม สามารถใช้งานได้เหมือนกับ RAM แต่ไม่ต้องใช้แบตเตอรี่สำรอง แต่ราคาจะแพงกว่าเนื่องจากรวมคุณสมบัติของ ROM และ RAM ไว้ด้วยกัน
RAM ทำหน้าที่เก็บโปรแกรมของผู้ใช้และข้อมูลที่ใช้ในการปฏิบัติงานของ PLC หน่วยความจำประเภทนี้จะมีแบตเตอรี่เล็กๆ ต่อไว้เพื่อใช้เป็นไฟเลี้ยงข้อมูลเมื่อเกิดไฟดับ การอ่านและการเขียนข้อมูลลงใน RAM ทำได้ง่ายมาก เพราะฉะนั้นจึ่งเหมากับงานในระยะทดลองเครื่องที่มีการเปลี่ยนแปลงแก้ไขโปรแกรมอยู่บ่อยๆ
ROM ทำหน้าที่เก็บโปรแกรมสำหรับใช้ในการปฏิบัติงานของ PLC ตามโปรแกรมของผู้ใช้ หน่วยความจำแบบ ROM ยังสามารถแบ่งได้เป็น EPROM ซึ่งจะต้องใช้อุปกรณ์พิเศษในการเขียนและลบโปรแกรม เหมาะกับงานที่ไม่ต้องการเปลี่ยนแปลงโปรแกรม นอกจากนี้ยังมีแบบ EEPROM หน่วยความจำประเภทนี้ไม่ต้องใช้เครื่องมือพิเศษในการเขียนและลบโปรแกรม สามารถใช้งานได้เหมือนกับ RAM แต่ไม่ต้องใช้แบตเตอรี่สำรอง แต่ราคาจะแพงกว่าเนื่องจากรวมคุณสมบัติของ ROM และ RAM ไว้ด้วยกัน
3.หน่วยอินพุต-เอาต์พุต (Input-Output Unit) หน่วยอินพุต ทำหน้าที่รับสัญญาณจากอุปกรณ์ภายนอกแล้วแปลงสัญญาณให้เป็นสัญญาณที่เหมาะสมแล้วส่งให้หน่วยประมวลผลต่อไป
หน่วยเอาต์พุต ทำหน้าที่รับข้อมูลจากตัวประมวลผลแล้วส่งต่อข้อมูลไปควบคุมอุปกรณ์ภายนอกเช่น ควบคุมหลอดไฟ มอเตอร์ และวาล์ว เป็นต้น
4.แหล่งจ่ายไฟ (Power Supply) ทำหน้าที่จ่ายพลังงานและรักษาระดับแรงดันไฟฟ้ากระแสตรงให้กับ CPU Unit หน่วยความจำและหน่วยอินพุท/ เอาท์พุท
5.อุปกรณ์ต่อร่วม (Peripheral Devices)
• PROGRAMMING CONSOLE
• EPROM WRITER
• PRINTER
• GRAPHIC PROGRAMMING
• CRT MONITOR
• HANDHELD
• etc
• PROGRAMMING CONSOLE
• EPROM WRITER
• PRINTER
• GRAPHIC PROGRAMMING
• CRT MONITOR
• HANDHELD
• etc
PLC ทำ งานอย่างไร?
ความรู้พื้นฐานด้านดิจิตอล (Number System)
ระบบเลขฐาน จัดเป็นระบบตัวเลขที่ใช้งานอยู่ใน PLC ดังนั้นผู้ใช้งานมีความจำเป็นต้องศึกษาระบบเลขฐานให้เข้าใจประกอบกับข้อมูลอื่นๆ เพื่อการใช้งานที่ถูกต้อง ระบบเลขฐานสอง (Binary)
ระบบเลขฐานสิบ (Decimal)
ระบบเลขฐานสิบหก (Hexadecimal)
ระบบเลขฐานสิบ (Decimal)
ระบบเลขฐานสิบหก (Hexadecimal)
ความสัมพันธ์ของเลข BIN, BCD และ HEX สามารถกำหนดให้เป็นตารางได้ดังนี้
HEX | BCD | FOUR DIGIT BINARY | |||
2^3 = 8 | 2^2 = 4 | 2^1 = 2 | 2^0 = 1 | ||
0 | 0 | 0 | 0 | 0 | 0 |
1 | 1 | 0 | 0 | 0 | 1 |
2 | 2 | 0 | 0 | 1 | 0 |
3 | 3 | 0 | 0 | 1 | 1 |
4 | 4 | 0 | 1 | 0 | 0 |
5 | 5 | 0 | 1 | 0 | 1 |
6 | 6 | 0 | 1 | 1 | 0 |
7 | 7 | 0 | 1 | 1 | 1 |
8 | 8 | 1 | 0 | 0 | 0 |
9 | 9 | 1 | 0 | 0 | 1 |
A | - | 1 | 0 | 1 | 0 |
B | - | 1 | 0 | 1 | 1 |
C | - | 1 | 1 | 0 | 0 |
D | - | 1 | 1 | 0 | 1 |
E | - | 1 | 1 | 1 | 0 |
F | - | 1 | 1 | 1 | 1 |
BIN (Binary) = ระบบเลขฐานสอง
BCD (Binary Code Decimal) = ระบบเลขฐานสิบ
HEX (Hexadecimal) = ระบบเลขฐานสิบหก
BCD (Binary Code Decimal) = ระบบเลขฐานสิบ
HEX (Hexadecimal) = ระบบเลขฐานสิบหก
1. ระบบเลขฐานสอง (Binary) ระบบเลขฐานสอง (Binary) จะเป็นระบบเลขที่ง่ายกว่าเลขฐานสิบ เนื่องจากระบบเลขฐานสอง จะใช้ัอักขระแทนสองตัว ระบบเลขฐานสองนี้ใช้ในระบบดิจิตอลอิเล็กทรอนิกส์ด้วย เพราะว่าวงจรดิจิตอลจะมีเพียงสองสถานะ(two states)หรือระดับสัญญาณสองระดับ (two signal levels)โดยมีตัวเลขที่ไม่ซ้ำกันอยู่ทั้งหมด 2 ตัว คือ 0 และ 1 หรืออาจใช้คำอื่นแทน
สถานะหนึ่ง | สถานะตรงข้าม |
0 | 1 |
Off | On |
Space | Mark |
Open | Closed |
Low | Hi |
ถ้าจะเทียบเลขฐานสองกับเลขฐานสิบแล้ว เลขฐานสองจะมีจำนวนหลักมากกว่า เพราะว่าในแต่ละหลักจะมีเลขได้สองค่า แต่ถ้าเป็นเลขฐานสิบแต่ละหลักจะมีเลขได้เก้าค่าคือ 0 ถึง 9
ระบบเลขฐานสิบ แต่ละหลักจะมีค่าเวจต์เป็นค่าสิบยกกำลังของหลักนั้น ระบบเลขฐานสองก็เช่นเดียวกัน จะมีฐานของเลขฐานสอง (base 2 system) การหาค่าเวจต์ในแต่ละหลักจะหาได้จากค่ายกกำลังสองของหลักนั้นๆ
ฐานสอง | ฐานสิบ |
2^0 | 1 |
2^1 | 2 |
2^2 | 4 |
2^3 | 8 |
2^4 | 16 |
2^5 | 32 |
2^6 | 64 |
2^7 | 128 |
2^8 | 256 |
2^9 | 512 |
2^10 | 1024 |
ค่าของ2ยกกำลังต่างๆเป็นฐานสิบ
ถ้าต้องการแปลงเลขฐานสองเป็นเลขฐานสิบก็สามารถทำได้ เช่นถ้าแปลงเลข 101101 เป็นเลขฐานสิบสามารถทำได้ดังนี้
(1x2^5)+(0x2^4)+(1x2^3)+(1x2^2)+(0x2^1)+(1x2^0) = 45
ตัวเลขฐานสอง 101101 จะมีค่าเท่ากับ 45 ในระบบเลขฐานสิบ
ระบบเลขฐานสองก็มีทศนิยมเช่นเดียวกับระบบเลขฐานสิบ ซึ่งเรียกว่าไบนารีพอยต์(binary point) โดยจะมีเครื่องหมายจุดแบ่งตัวเลขจำนวนเต็มกับเลขทศนิยมออกจากกัน ค่าเวจต์ของเลขทศนิยมแต่ละหลักจากซายไปขวาจะเป็นดังนี้ 1/2 , 1/4 , 1/8 , 1/16........ไปเรื่อยๆหรืออาจจะเขียนเป็นเลขยกกำลังค่าลบก็ได้
(1x2^5)+(0x2^4)+(1x2^3)+(1x2^2)+(0x2^1)+(1x2^0) = 45
ตัวเลขฐานสอง 101101 จะมีค่าเท่ากับ 45 ในระบบเลขฐานสิบ
ระบบเลขฐานสองก็มีทศนิยมเช่นเดียวกับระบบเลขฐานสิบ ซึ่งเรียกว่าไบนารีพอยต์(binary point) โดยจะมีเครื่องหมายจุดแบ่งตัวเลขจำนวนเต็มกับเลขทศนิยมออกจากกัน ค่าเวจต์ของเลขทศนิยมแต่ละหลักจากซายไปขวาจะเป็นดังนี้ 1/2 , 1/4 , 1/8 , 1/16........ไปเรื่อยๆหรืออาจจะเขียนเป็นเลขยกกำลังค่าลบก็ได้
ฐานสอง | ฐานสิบ |
2^ -1 | 0.5 |
2^ -2 | 0.25 |
2^ -3 | 0.125 |
2^ -4 | 0.0652 |
2^ -5 | 0.03125 |
2^ -6 | 0.015625 |
ค่าของ2ยกกำลังค่าลบ เป็นเลขฐานสิบ
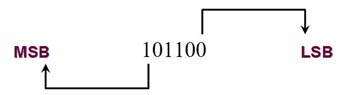
ในระบบเลขฐานสิบนั้นแต่ละหลักจะเรียกว่าหลัก แต่ถ้่าเป็นระบบเลขฐานสองแต่ละหลักจะเรียกว่าบิต (bit) คำว่าบิต (bit) ย่อมาจาก binary digit ถ้าในงานดิจิตอลอิเล็กทรอนิกส์ จะพบคำว่า “Bit” บ่อยมาก
ในแต่ละหลักของเลขฐานสอง หลักซึ่งมีค่าเวจต์ต่ำสุดซึ่งอยู่ทางด้านขวาสุด จะเรียกว่าบิตที่มีความสำคัญต่ำสุด(LSB : Least Significant Bit) สำหรับด้านที่อยู่ซ้ายสุดจะมีค่าเวจต์สูงสุด เรียกว่าบิตที่มีความสำคัญสูงสุด(MSB : Most Significant Bit) ถ้าใช้ในระบบเลขฐานสิบจะเรียกว่า LSD(Least Significant Digit) และ MSD(Most Significant Digit) ในระบบดิจิตอลในบางครั้งเราจะเห็นเขียนว่า MSD , LSD กำกับเอาไว้ด้วย
ในแต่ละหลักของเลขฐานสอง หลักซึ่งมีค่าเวจต์ต่ำสุดซึ่งอยู่ทางด้านขวาสุด จะเรียกว่าบิตที่มีความสำคัญต่ำสุด(LSB : Least Significant Bit) สำหรับด้านที่อยู่ซ้ายสุดจะมีค่าเวจต์สูงสุด เรียกว่าบิตที่มีความสำคัญสูงสุด(MSB : Most Significant Bit) ถ้าใช้ในระบบเลขฐานสิบจะเรียกว่า LSD(Least Significant Digit) และ MSD(Most Significant Digit) ในระบบดิจิตอลในบางครั้งเราจะเห็นเขียนว่า MSD , LSD กำกับเอาไว้ด้วย
3. ระบบเลขฐานสิบหก (Hexadecimal)
ระบบเลขฐานสิบหก (Hexadecimal) ฐานของมันจะมีค่าเป็น 16 ซึ่งจะมีตัวเลขที่ไม่ซ้ำกันอยู่ทั้งหมด 16 ตัว คือ 0 1 2 3 4 5 6 7 8 9 A B C D E F (ตัวอักษร 6 ตัว แทน ตัวเลข 10 –15 ตามลำดับ)
ในงานด้านอิเล็กทรอนิกส์และคอมพิวเตอร์ ตัวเลขที่ใช้ในการประมวลผลจะเป็นเลขฐานสอง แต่ถ้าตัวเลขมีค่ามากจะทำให้เลขฐานสองมีหลายหลัก จึงใช้เลขฐานสิบหกแทนเลขฐานสอง แล้วจะมีการแปลงเลขฐานสิบหกเป็นเลขฐานสองอีกทีหนึ่ง เลขฐานสิบหกนั้นจะนิยมใช้มากในคอมพิวเตอร์ ถ้าหากไบนารี่ที่ใ่ช้ในระบบคอมพิวเตอร์เป็นแบบ 8 บิต ซึ่งแทนเลขฐานสิบหกได้ตั้งเเต่ 0 ถึง 255 แต่สามารถแทนด้วยเลขฐานสิบหกเพียงสองหลักเท่านั้น ถ้าหากเรามีเลขฐานสิบ 99,999,999 ถ้าเขียนแทนด้วยเลขไบนารีจะต้องใช้หลายบิต แต่ถ้าเขียนเเทนด้วยเลขฐานสิบหกจะใช้เพียงไม่กี่หลัก
ค่าสิบหกสามารถแทนได้ด้วยสองยกกำลังสี่ หรือ 16 = 2^4 ดังนั้นเลขฐานสิบหกจึงสามารถเขียนแทนด้วยเลขฐานสองได้สี่บิต โดยมีค่าตั้งแต่ 0000 ถึง 1111 หรือแทนด้วยอักษร 0 ถึง F ความสัมพันธ์ระหว่างเลขฐานสอง ฐานสิบ และฐานสิบหกแสดงใ้ว้ในตารางความสัมพันธ์ของเลข BIN, BCD และ HEX
การแปลงเลขฐานสองเป็นเลขฐานสิบหกก็สามารถทำได้โดยง่าย โดยจัดเลขฐานสองตั้งแต่บิตแรกจนถึงบิตสุืดท้ายเป็นกลุ่มๆ โดยจัดกลุ่มละ 4 บิตและแทนค่าด้วยเลขฐานสิบหกแต่ละค่าให้สอดคล้องกันตัวอย่างต่อไปนี้จะเป็นการแปลงเลขฐานสองเป็นฐานสิบหก
—การแปลงเลข 10101011111101 เป็นเลขฐานสิบหกสามารถทำได้โดย การแบ่งกลุ่ม ๆ ละ 4 บิตดังนี้
0010 1010 1111 1101
จะเห็นว่าถ้าแบ่งเป็นกลุ่ม ๆ ละ 4 บิต จะมีสองบิตบนที่จัดกลุ่มไม่ได้ ก็ให้เติม 0 ไปในกลุ่มนั้นให้ครบ 4 บิต จากนั้นแทนค่าตัวเลขแต่ละกลุ่มด้วยเลขฐานสิบหกดังนี้
2 A F D
ดังนั้นจะได้ 10101011111101 มีค่าเท่ากับ 2AFD
ให้จำใว้ว่าเลขฐานสิบหกที่เรามองเห็นนั้นเป็นการใช้แทนเลขไบนารีเพราะ CPU ไม่สามารถประมวลผลเลขฐานสิบหกได้
ประเภทของข้อมูลเช่น บิต, ไบต์, เวิร์ด
ข้อมูลภายใน PLC จะมีคำจำกัดความที่เรียกกันคือ บิต (BIT), ไบต์ (Byte), เวิร์ด (Word) หลักการเรียกและความหมายของแต่ละคำมีดังนี้
1 Word = 2 Byte
1 Byte = 2 Digit
1 Digit = 4Bit
เช่น ข้อมูลขนาด 256 กิโลบิต (kBit) จะสามารถเก็บข้อมูลได้กี่กิโลไบต์ ?
8 บิต = 1 ไบต์
256 กิโลบิต = (256 x 1000)/8 = 32,000 ไบต์
= 32 กิโลไบต์
หน่วยความจำ ขนาด 6 kWords ถ้าจะเปลี่ยนหน่วยเป็น kB. จะได้เท่าไร ?
1 Word = 2 ไบต์
6 kWord = 2 x 6 x 1000 = 12,000 ไบต์
= 12 กิโลไบต์
ลอจิกเกต (LOGIC GATE)
PLC ทำงานด้วยหลักการของ binary คือ เป็นอย่างใดอย่างหนึ่งใน 2 สถานะ เช่น สูงหรือต่ำ
ปิดหรือเปิด, 0 หรือ 1 เกตเป็นสัญลักณ์ของวงจรที่่ใช้แทนลอจิก ระบบที่เรียกว่าพีชคณิตบูลลีนใช้แสดงอินพุตและเอาท์พุต เกตพื้นฐานมีดังนี้
อินเวอร์เตอร์ INVERTER-NOT
อินเวอร์เตอร์เป็นเกตที่มี 1 อินพุต 1 เอาท์พุตท์ วงจรให้เอาท์พุตที่ตรงข้ามกับอินพุต เช่นถ้าอินพุตเป็น 0 เอาท์พุตจะเป็น 1 ถ้าอินพุตเป็น 1 เอาท์พุตจะเป็น 0

A | Y |
0 | 1 |
1 | 0 |
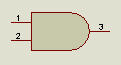
แอนด์เกต AND GATE
เป็นเกตที่มีตั้งแต่สองอินพุตขึ้นไป มี 1 เอาท์พุต วงจรให้เอาท์พุตเป็น 1 เมื่ออินพุตทุกตัวมีค่าเป็น 1 กรณีอื่นๆเอาท์พุตจะมีค่าเป็น 0
A | B | Y |
0 | 0 | 0 |
0 | 1 | 0 |
1 | 0 | 0 |
1 | 1 | 1 |
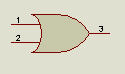
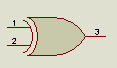
ออร์เกต OR GATE
เป็นเกตที่มีตั้งแต่สองอินพุตขึ้นไป มี 1 เอาท์พุต วงจรให้เอาท์พุตเป็น 1 เมื่อตัวไดตัวหนึ่งมีค่าเป็น 1 เมื่ออินพุตทุกตัวมีค่าเท่ากับ 0 เอาท์พุตจะมีค่าเป็น 0
A | B | Y |
0 | 0 | 0 |
0 | 1 | 1 |
1 | 0 | 1 |
1 | 1 | 1 |
แนนด์เกต NAND GATE เป็นเกตที่มีตั้งแต่สองอินพุตขึ้นไป มีการทำงานตรงข้ามกับ แอนด์เกต(วงจรให้เอาท์พุตเป็น 0 เมื่ออินพุตทุกตัวมีค่าเป็น 1 กรณีอื่นๆค่าเอาท์พุตจะมีค่าเป็น 1 )

A | B | Y |
0 | 0 | 1 |
0 | 1 | 1 |
1 | 0 | 1 |
1 | 1 | 0 |
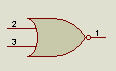
นอร์เกต NOR GATE
เป็นเกตที่มีตั้งแต่สองอินพุตขึ้นไป มีการทำงานตรงข้ามกับออร์เกต(วงจรจะให้เอาท์พุตเป็น 0 ก็ต่อเมื่ออินพุตตัวไดตัวหนึ่งมีค่าเป็น1)
A | B | Y |
0 | 0 | 1 |
0 | 1 | 0 |
1 | 0 | 0 |
1 | 1 | 0 |
เอ็กซ์คลูซิฟออร์เกต X-OR GATE เป็นเกตที่มี 2 อินพุต 1 เอาท์พุต วงจรให้เอาท์พุตเป็น 1 เมื่ออินพุตมีค่าต่างกัน ให้เอาท์พุตเป็น 0 เมื่ออินพุตมีค่าเหมือนกัน
A | B | Y |
0 | 0 | 0 |
0 | 1 | 1 |
1 | 0 | 1 |
1 | 1 | 0 |
เอ็กซ์คลูซิฟนอร์เกต X-NOR GATE เป็นเกตที่มี 2 อินพุต 1 เอาท์พุต วงจรให้เอาท์พุตเป็น 1 เมื่ออินพุตมีค่าเหมือนกัน ให้เอาท์พุตเป็น 0 เมื่ออินพุตมีค่าต่างกัน

A | B | Y |
0 | 0 | 1 |
0 | 1 | 0 |
1 | 0 | 0 |
1 | 1 | 1 |
ไม่มีความคิดเห็น:
แสดงความคิดเห็น